|
|

|

|
| e-Pub |
Section: New Software and Platforms
New Software and Platforms
RdP to VHDL tool
Participants : David Andreu, Thierry Gil, Robin Passama, Baptiste Colombani, Thibaut Possompes.
Our SENIS (Stimulation Electrique Neurale dIStribuee) based FES architecture relies on distributed stimulation units (DSU) which are interconnected by means of a 2-wire based network. A DSU is a complex digital system since its embeds among others a dedicated processor (micro-machine with a specific reduced instruction set), a monitoring module and a 3-layer protocol stack. To face the complexity of the units digital part and to ease its prototyping on programmable digital devices (e.g. FPGA), we developed an approach for high level hardware component programming (HILECOP). To support the modularity and the reusability of sub-parts of complex hardware systems, the HILECOP methodology is based on components. An HILECOP component has: a Petri Net (PN) based behavior, a set of functions whose execution is controlled by the PN, and a set of variables and signals. Its interface contains places and transitions from which its PN model can be inter-connected as well as signals it exports or imports. The interconnection of those components, from a behavioral point out view, consists in the interconnection of places and/or transitions according to well-defined mechanisms: interconnection by means of oriented arcs or by means of the "merging" operator (existing for both places and transitions).
The Eclipse-based version of HILECOP (registered at the french Agence de Protection des Programmes (APP)) is regulary updated.
Undergoing work concerns the integration, in the HILECOP tool, of the formalism evolutions that allow behavior agregation as well as exception handling, both for analysis and implementation sides (H. Leroux PhD thesis).
Specification of GALS systems (Globally Asynchronous Locally Synchronous) is also an ongoing work, the aim being to take into account deployment properties like connecting different clocks to HILECOP components within a same FPGA, or on a set of interconnected FPGAs (and thus interconnecting them by means of asynchronous signals).
SENISManager
Participants : Robin Passama, David Andreu.
We developed a specific software environment called SENISManager allowing to remotely manage and control a network of DSUs, i.e. the distributed FES architecture. SENISManager performs self-detection of the architecture being deployed. This environment allows the manipulation of micro-programs from their edition to their remote control. It also allows the programming of control sequences executed by an external controller in charge of automatically piloting a stimulator.
SENISManager (registered at the french Agence de Protection des Programmes (APP) with the industrial partner) has been transferred to the industrial partner that develops a new version according to an Eclipse-based design.
Synergy Neurostimulation Software
Participants : David Andreu, Amandine Pantel, Arthur Hiairrassary.
We are developing a specific software environment called Synergy Neurostimulation Software allowing to remotely manage a stimulation architecture based on one controller piloting a set of distributed stimulation units, connected by means of a dedicated network. The controller embeds the set of FES functions according to which it controls stimulation units, in real-time.
This FES distributed architecture is based on our last version of stimulation units that embed stimulation sequencing and a more efficient modulation mechanism.
Synergy Neurostimulation Software will be soon registered at the french Agence de Protection des Programmes (APP).
MOS2SENS: Model Optimization and Simulation To Selective Electrical Neural Stimulation
Participants : Melissa Dali, Olivier Rossel, David Guiraud.
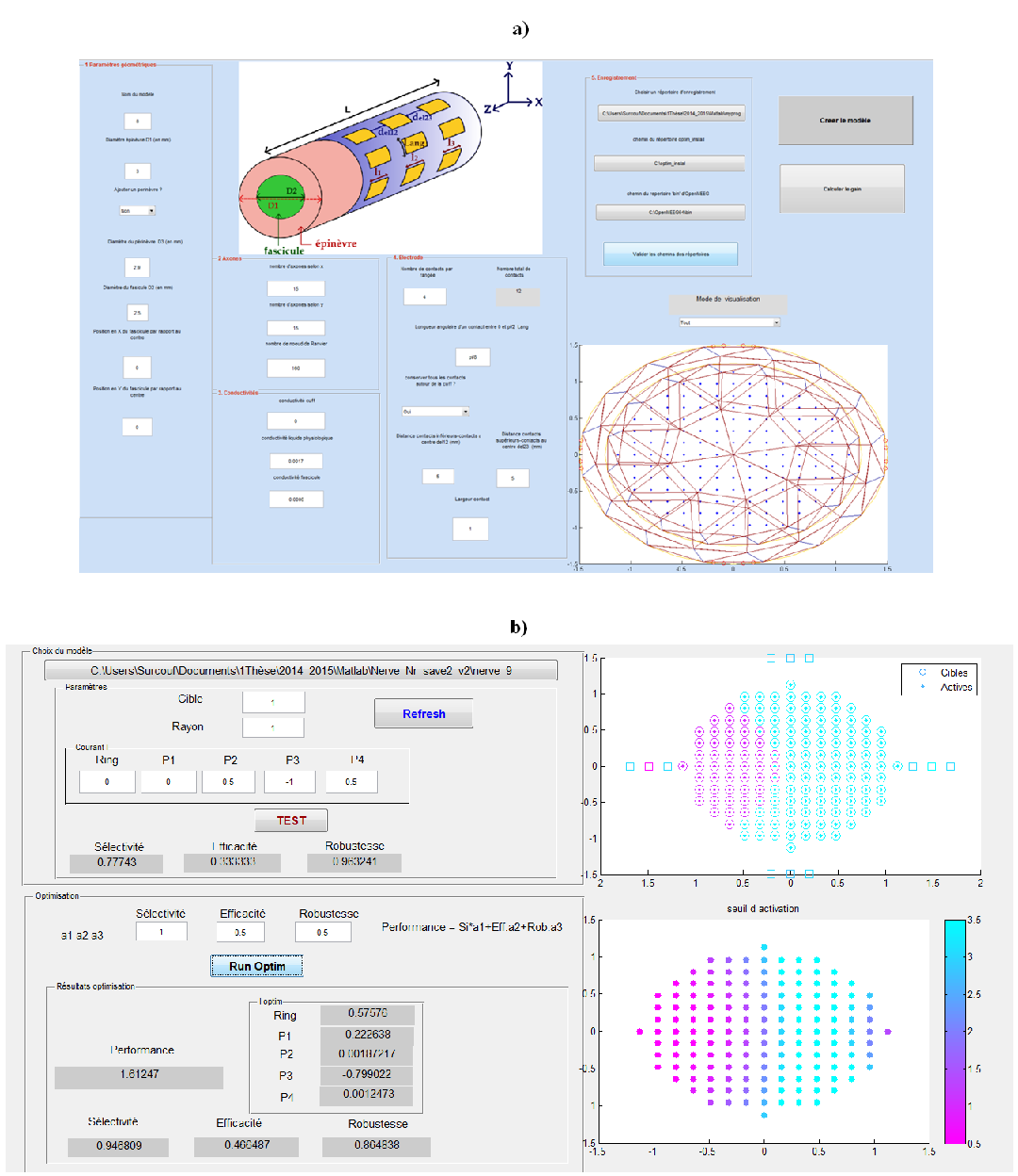
Multipolar electric stimulation of the nerve is a main issue, to access selective activation of organ or muscles. Knowing that electrodes configurations have to be specific to the type of nerve and to the organic or muscular targeted, we work on an accurate and flexible nerve modeling (work extension of Jérémy Laforêt PhD thesis, 2009), and we have developed new software MOS2SENS (from Model Optimization and Simulation To Selective Electrical Neural Stimulation) (fig.1 ). This model can predict nerve fiber activation through multipolar electrode stimulation. Furthermore the models provide an optimal current configuration to activate accurately the targeted muscle or organ (indeed a targeted group of fiber).
The new software MOS2SENS is an adjustment support tool for neuroprosthetics devices. It models and optimizes the current injected by multipolar CUFF electrodes inside the nerve in order to activate selective fiber targets in terms of spatial criterion.
There are two programs that perform the following functions:
-
Mathematical description of the link between stimulation currents and extracellular voltage present inside the nerve
-
Nerve fiber activation prediction based on the current stimulation
-
Optimization of the current injected according to the chosen target
The software has been implemented in Matlab with graphical user interface and use OpenMEEG open source software to compute electric fields from the electrode to the fibers.
MOS2SENS is filed in the Agency for the Protection of Programs (APP) under the identifier
IDDN.FR.001.490036.000.S.P.2014.000.31230
|
SENSBIOTK
As low cost and highly portable sensors, inertial measurements units (IMU) have become increasingly used in different topics, such as gait analysis, embodying an efficient alternative to motion capture systems. Meanwhile, being able to compute reliably accurate spatial parameters using few sensors remains a relatively complex problematic. The use of inertial data calls on various algorithms able to compute from raw sensors (accelerometer, magnetometer and gyrometer) different features (position, angle, etc...). SensbioTK (for Tool Kit) has been implemented using a Python programming environment. This opensource library provides to any IMU user a set of tools enabling the following functions :
-
Computation of optimized scale and offset parameters for inertial sensors calibration (Gauss newton optimization)
-
AHRS sensor fusion algorithms (Kalmann filter and gradient descent based) : Madgwick, Mahony and Martin-Salaun implementation
Many "ready to use" examples with relative data and scripts : goniometer, compass, pedometer, motion capture validation...